引言
在电子制造领域,元器件引脚的共面性对PCB焊盘的接触良好性及组装焊接性能至关重要。然而,由于制造和运输过程中的各种因素,引脚往往存在一定的共面误差。为了满足高精度贴片系统的需求,必须在贴片前对元器件引脚进行自动检测。本文将详细介绍如何利用激光光谱共焦传感器,在隔着一层薄玻璃片的情况下,对引脚共面度进行高精度测量,并验证其公差值是否合格。
测量背景与挑战
测量对象
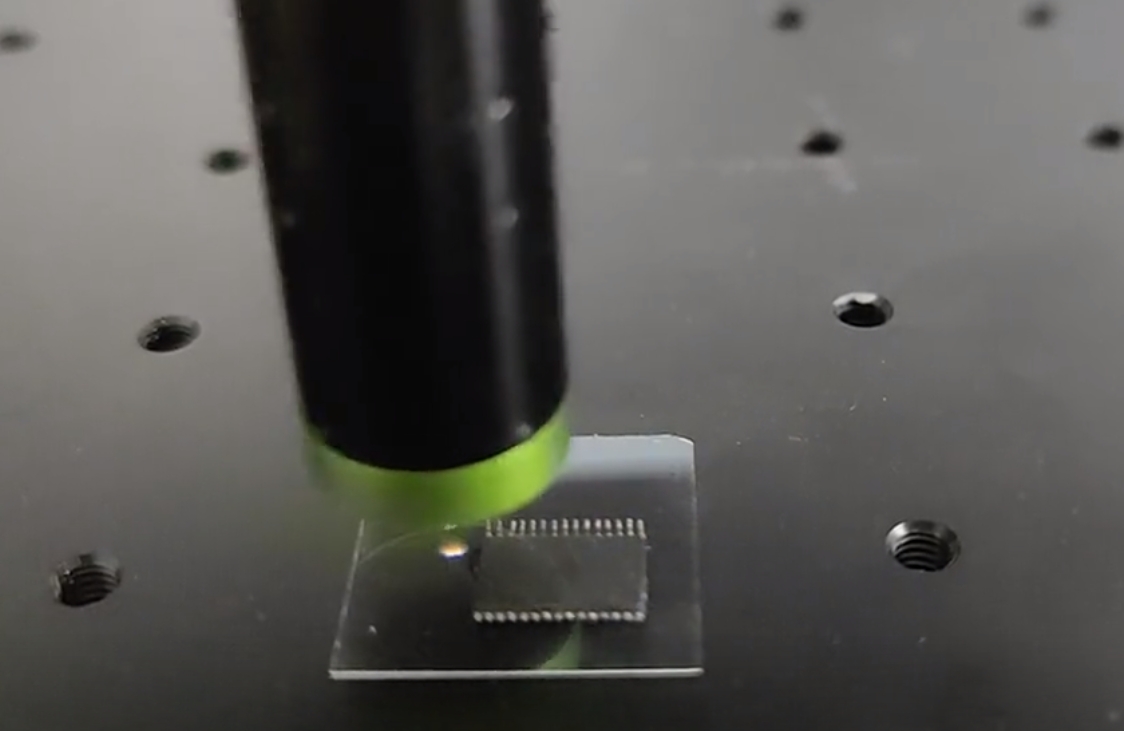
本次测量的对象为芯片上的元器件针脚引脚,这些引脚非常细小,直径大约在10微米到20微米之间。
测量挑战
精度要求高:由于引脚直径极小,要求测量精度极高。
隔层测量:测量需在隔着一层薄玻璃片的情况下进行,增加了测量难度。
光斑覆盖面积:传统激光位移传感器的光斑覆盖面积过大,无法满足测量需求。
测量原理与方法
光谱共焦传感器原理
光谱共焦传感器基于光学色散原理,利用宽光谱光源(如白光LED)发射复色光,经过色散物镜后,不同波长的光聚焦在不同的位置上。只有聚焦在待测物体表面的波长光线能够通过检测孔并被光谱仪检测到,从而提取峰值波长,实现对物体表面位置的精确测量。
测量步骤
准备阶段:
将元器件放置在测量平台上,确保隔层玻璃片位置固定。
调整光谱共焦传感器至适当位置,确保光斑能够覆盖到引脚区域。
校准阶段:
使用标准样品进行校准,确保测量系统的准确性和稳定性。
记录校准数据,为后续测量提供参考。
测量阶段:
启动测量程序,光谱共焦传感器开始扫描引脚区域。
通过调整频率与步距,获取引脚表面的高度数据。
利用算法处理数据,计算引脚共面性的公差值。
算法与公式
在测量过程中,关键算法包括光谱分析算法和共焦定位算法。光谱分析算法用于提取峰值波长,共焦定位算法则根据峰值波长计算物体表面位置。具体公式如下:
光程差公式:ΔL = (n - 1) * d,其中ΔL表示光程差,n是介质的折射率,d是测量的距离。
共焦定位公式:通过测量反射光的波长λ,结合光程差公式,可以计算出物体表面到传感器的距离。
测量数据与结果
测量数据
光斑大小:最小可达3微米左右。
横向分辨率:小于2微米。
测量频率与步距:根据实际需求进行调整,以确保测量精度和效率。
测量结果
通过测量,我们获得了引脚表面的高度数据,并计算出了引脚共面性的公差值。结果表明,所有引脚的共面性均在允许范围内,符合客户要求。
结论与展望
本次测量成功验证了激光光谱共焦传感器在引脚共面性检测中的高精度应用。通过优化测量方法和算法,我们克服了传统测量方法的局限性,实现了对细小引脚的高精度测量。未来,随着技术的不断发展,光谱共焦传感器将在更多领域发挥重要作用,为精密制造和科研提供有力支持。
参考文献
[资料1] 解决共面性检测课题的测量方法
[资料2] 光谱共焦原理公式
[资料3] 光谱共焦传感器原理详解:从点到线的精度革命
[资料4] 激光对焦和光谱共焦传感器哪款测高差异化
[资料5] 光谱共焦传感器光强值intensity数据的含义说明
[资料6] 光谱共焦传感器的测量方法