随着制造业对产品质量要求的不断提高,对管桶边缘高度差、毛刺以及薄壁杯子形状的高精度检测需求日益迫切。本文详细介绍了一种基于3D线激光位移传感器的高精度测量技术,该技术能够准确捕捉并分析管桶边缘及薄壁杯子的几何特征,为质量控制提供强有力的支持。
一、技术背景
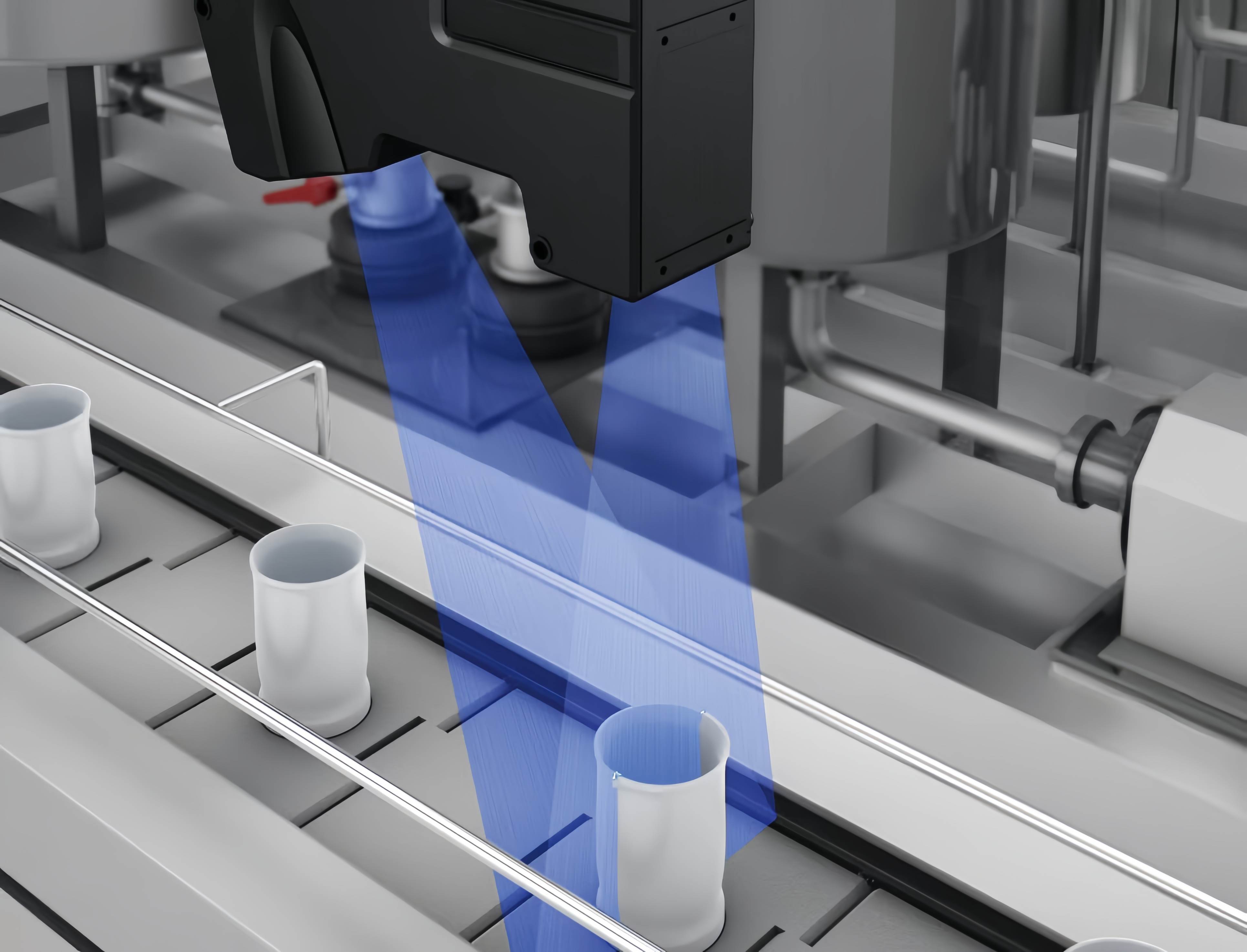
3D线激光位移传感器是一种基于激光三角测量原理的高精度测量设备。它发射一束线激光到被测物体表面,并接收由物体表面反射回来的光信号。通过处理这些光信号,传感器能够计算出物体表面每个点相对于传感器的三维坐标(X, Y, Z)。其中,X坐标代表扫描线的位置,Y坐标代表物体表面的横向位置,Z坐标代表物体表面的高低位置(即深度信息)。
二、测量原理
1. 激光三角测量法
激光位移传感器利用激光束照射被测物体表面,通过接收反射光并计算其角度变化来确定物体的位移。这种方法具有非接触、测量速度快、精度高等优点。传感器内部由激光器、激光检测器和测量电路组成。激光束经物体表面漫反射后,被内部的CCD线性相机接收。根据不同的距离,CCD线性相机可以在不同的角度下“看见”这个光点。根据这个角度及已知的激光和相机之间的距离,通过几何关系计算出传感器与被测物体之间的距离。
2. 3D点云数据生成
通过扫描过程中的连续采样,传感器能够获取被测物体表面大量点的三维坐标信息,形成3D点云数据。这些数据包含了物体表面的形状、高度差、毛刺和凹陷等详细信息。
三、测量步骤与方法
1. 设备选型与安装
选用一款高性能的3D线激光位移传感器,关键参数如下:
安装距离:74mm
测量范围(MR):±27mm(F.S.=54mm)
视野范围:77mm(基准)
X方向分辨率:20μm
Z轴线性度:±0.03%的FS(±0.006%)
Z轴重复精度:0.4um
X轴轮廓点数:4096
扫描频率(Hz):全画幅:250μs(4KHz),高速模式(Z轴1/32量程):21ps(49kHz)
将传感器安装在预定位置,调整安装距离至74mm,确保传感器视野覆盖整个测量区域。进行初步校准,确保测量基准面的准确性。
2. 测量点选取
在管桶边缘及薄壁杯子表面选取代表性点位,这些点位应覆盖不同高度区域,以确保测量的全面性。例如,在管桶边缘选取20个点位,在薄壁杯子表面选取多个环形或网格状点位。
3. 数据采集与处理
启动传感器,对选取的点位进行连续测量。传感器以高速模式运行,确保每次测量的快速性和准确性。收集每次测量的数据,计算每个点位的平均高度值及标准差,以评估重复精度。同时,根据基准面拟合结果,计算各点位相对于基准面的高度差。
对于毛刺和凹陷等外观检测,可以通过对3D点云数据进行处理和分析来实现。利用软件中的特征提取技术提取出毛刺和凹陷的轮廓和特征,如尺寸、形状等。然后,根据这些特征进行识别和分类,输出检测结果。
四、案例分析
1. 管桶边缘高度差测量
选取一款尺寸为60*400mm的管桶,在边缘区域选取20个点位进行高度测量。测量精度要求达到1mm±0.15mm。经过连续15次静态测量,最大静态重复性误差为0.08mm,远低于要求的精度范围。这表明所选用的3D线激光位移传感器具有极高的重复精度和稳定性,完全满足管桶边缘高度差测量的需求。
2. 薄壁杯子形状检测
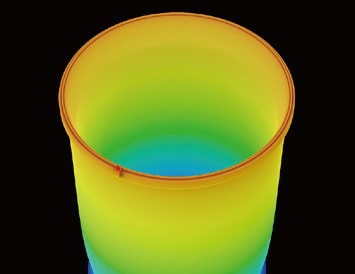
选取一款薄壁杯子,使用3D线激光位移传感器对其表面进行扫描。传感器以高速模式运行,快速获取杯子表面的三维坐标信息。通过对3D点云数据进行处理和分析,可以准确捕捉杯子的形状特征,包括杯口直径、杯壁厚度、底部形状等。同时,还可以对杯子表面的毛刺和凹陷等外观缺陷进行检测和识别。
五、结论
3D线激光位移传感器以其高精度、非接触测量的优点,在管桶边缘及薄壁杯子检测中展现出了巨大的应用潜力。通过该技术,可以准确捕捉并分析被测物体的几何特征,为质量控制提供强有力的支持。随着传感器技术和数据处理算法的不断进步,3D线激光位移传感器将在更多领域得到广泛应用,推动制造业的进一步发展。